

Una vez realizada la selección y la instalación, procederemos a la puesta en marcha de válvulas de control en sistemas de vapor y, para ello, conoceremos los métodos prácticos para configurar un controlador, que en principio debe hacerse de manera individual para que coincida con las características de un sistema en particular.
Aunque hay un número de diferentes técnicas mediante las cuales se puede lograr un control estable y rápido, el método de Ziegler-Nichols ha demostrado ser muy eficaz.
El método de Ziegler-Nichols
El método de respuesta en frecuencia de Ziegler-Nichols (a veces llamado el método de oscilación crítica) es muy eficaz para establecer la configuración de un controlador para la carga real. El método utiliza el controlador como un amplificador para alcanzar el punto de inestabilidad. En este punto, todo el sistema está funcionando en una manera tal que la temperatura fluctúa alrededor del punto de consigna con una amplitud constante, tal y como se muestra en la siguiente gráfica:
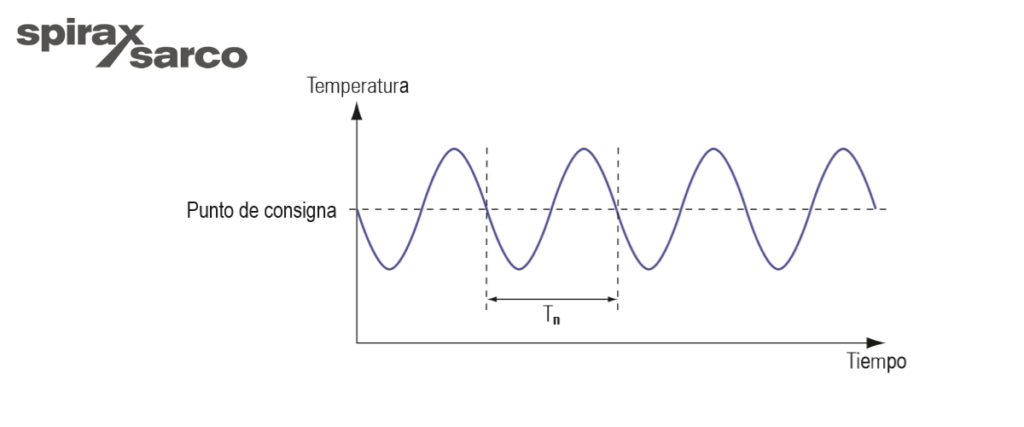
Un pequeño aumento en la ganancia, o una banda proporcional reducida, harán que el sistema sea inestable y la válvula de control comenzará a oscilar con un aumento de amplitud. A la inversa, un aumento de la banda proporcional hará que el proceso sea más estable y la amplitud será sucesivamente más reducida. En el punto de inestabilidad, la característica del sistema se obtiene para las condiciones reales de funcionamiento, incluyendo el intercambiador de calor, válvula de control, actuador, tuberías y sensor de temperatura.
En la puesta en marcha de válvulas de control en sistemas de vapor, los ajustes del controlador se pueden determinar mediante el método de Ziegler-Nichols leyendo el período de tiempo (Tn) de los ciclos de temperatura y el ajuste real de la banda proporcional en el punto de inestabilidad.
En la puesta en marcha de válvulas de control en sistemas de vapor, el procedimiento para seleccionar los ajustes de parámetros PID, utilizando el método de Ziegler-Nichols, es el siguiente:
- Retirar la acción integral en el controlador aumentando el tiempo integral (Ti) a su máximo.
- Retirar la acción derivativa del controlador ajustando el tiempo de derivación (TD) a 0.
- Esperar hasta que el proceso llegue a una condición estable.
- Reducir la banda proporcional (aumentar la ganancia) hasta que se alcanza el punto de inestabilidad.
- Medir el tiempo de un período (Tn) y anotar el ajuste de la banda P real (banda proporcional) del controlador en este punto.
- Con esta configuración como punto de inicio, calcular los ajustes del controlador apropiadas de acuerdo a los valores del siguiente cuadro:

Los ajustes del controlador se pueden ajustar aún más para aumentar la estabilidad o la respuesta. El impacto que tiene el cambiar el ajuste de los parámetros PID en la estabilidad y la respuesta del control, se muestra en el próximo cuadro:


Transferencia sin saltos
Las especificaciones técnicas de los controladores incluyen muchos otros términos y uno que se encuentra con frecuencia es “transferencia sin salto”. La mayoría de los controladores incorporan un interruptor “Manual” – “Auto” y existen momentos en los que ciertas situaciones de control requieran un control manual. Esto hace que sea necesario interrumpir el lazo de control automático.
Sin transferencia sin saltos, la transferencia de Auto a Manual y viceversa significaría que se perderían los niveles de control, a menos que la señal de salida manual se correspondiese con la señal de salida automática. La transferencia sin saltos asegura que las señales de salidas, ya sea de manual a automático o de automático a manual, coincidan y sólo sería necesario mover el interruptor según corresponda.
Controladores autoajustables
En el espacio reducido de un controlador moderno, encontramos microprocesadores que incorporan algunas funciones que antes requerían un ordenador. Entre estas, la capacidad de “autoajuste”. Desde hace muchos años están disponibles controladores que ya no precisan de un ingeniero de puesta en marcha de válvulas de control en sistemas de vapor para pasar por el proceso de ajustar los términos PID.
Es el propio controlador autoajustable quien conmuta a control de todo/nada durante un determinado período de tiempo. Durante este período se analizan los resultados de sus respuestas y calcula y ajusta sus propios términos PID. Antes la función de autoajuste sólo podría aplicarse durante el arranque del sistema, una vez configurado por el controlador, los términos PID se mantienen constantes, independientemente de los cambios posteriores en el proceso.
El controlador moderno ahora puede operar lo que se denomina una función adaptativa, que no sólo configura los términos PID iniciales requeridos, también monitoriza y reajusta estos términos, si fuese necesario, de acuerdo a los cambios en el proceso durante las condiciones normales de funcionamiento. Estos controladores están disponibles y son relativamente baratos. Su uso es cada vez más generalizado, incluso para tareas de control relativamente poco sofisticadas.
Si estás interesado en conocer más acerca de la puesta en marcha de válvulas de control en sistemas de vapor, te invitamos a suscríbete al Newsletter de Vapor para La Industria, con el cual recibirás información de gestión eficiente de los sistemas de vapor.
 Instalación de válvulas de control en sistemas de vapor
Instalación de válvulas de control en sistemas de vapor